Рейнгард Геттнер - Роботы сегодня и завтра
Здесь можно скачать бесплатно "Рейнгард Геттнер - Роботы сегодня и завтра" в формате fb2, epub, txt, doc, pdf. Жанр: Техническая литература, издательство Педагогика, год 1988. Так же Вы можете читать книгу онлайн без регистрации и SMS на сайте LibFox.Ru (ЛибФокс) или прочесть описание и ознакомиться с отзывами.
Название:
Роботы сегодня и завтра
Автор:
Издательство:
Педагогика
Жанр:
Год:
1988
ISBN:
5-7155-0119-9
Скачать:





Скачивание начинается... Если скачивание не началось автоматически, пожалуйста нажмите на эту ссылку.
Вы автор?
Жалоба
Жалоба
Все книги на сайте размещаются его пользователями. Приносим свои глубочайшие извинения, если Ваша книга была опубликована без Вашего на то согласия.
Напишите нам, и мы в срочном порядке примем меры.
Напишите нам, и мы в срочном порядке примем меры.
Как получить книгу?
Оплатили, но не знаете что делать дальше? Инструкция.
Описание книги "Роботы сегодня и завтра"
Описание и краткое содержание "Роботы сегодня и завтра" читать бесплатно онлайн.
Книга ученых ГДР посвящена актуальным направлениям совершенствования промышленного производства — роботизации и компьютеризации. Школьники узнают о том, как использование роботов и различных электронных систем способствует ускорению научно-технического прогресса, расширят свои представления о робототехнике.
Для старшеклассников.
Сварка — точечная или дуговая — трудоемкий и сложный технологический процесс. О значении сварочных работ свидетельствуют такие примеры: судно водоизмещением 10 тыс. тонн насчитывает 150 км сварных швов, а для соединения 600 прессованных или штампованных деталей металлического кузова автомашины необходимо 6 тыс. точечных сварок и 20 м швов с дуговой сваркой. В настоящее время сварочные автоматы в состоянии выполнять относительно длинные швы. Что касается многочисленных коротких угловых и стыковых швов, то они еще варятся вручную, хотя наиболее пригодны для этих целей роботы — короткие швы при ручном исполнении зачастую требуют больше времени на переоснастку, чем на саму сварку.
Эффективность сварочного робота зависит в первую очередь от правильности его технологического использования. Если сейчас их в основном приспосабливают к уже имеющимся технологическим цепочкам, то в будущем появятся новые конструкции сварочных роботов. Они будут устанавливаться по нескольку единиц на производственных линиях или производственных участках. При технологической подготовке производственного процесса инженеры по сварке определяют, какой из видов сварочных работ наиболее приемлем в данном случае, и выбирают оптимальные формы соединения. Принятие специалистами по сварке соответствующих решений облегчается специально разработанными программами.
Центральный институт по сварочной технике ГДР в г. Галле разработал в рамках гибкой системы отдельные блоки, из которых можно скомпоновать различные сварочные роботы.
От сварочных роботов требуется высокая точность, маневренность и скорость. Они должны самостоятельно перемещать сварочную горелку, сварочные клещи и свариваемые детали. В большинстве случаев для этого достаточна шестая степень свободы маневрирования. В зависимости от выполняемой задачи сварочный робот может развивать скорость от 300 до 500 мм/с. Несущая способность робота определяется типом сварочной горелки и обрабатываемой детали.
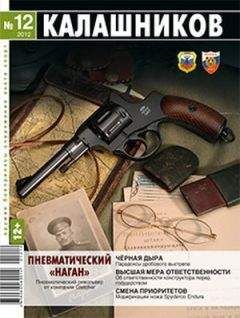
Сварочная горелка с сенсорами.
Тот, кто бывал в кузнице, наверняка восхищался видом раскаленной стали, уверенными движениями кузнецов, орудующих своими молотами, видом шипящих паром готовых поковок. Но внимательный наблюдатель отметил бы и трудности этой работы, требующей большой мускульной силы, отметил бы адский грохот и изнуряющую жару. Замена в этом процессе кузнеца роботом, как видим, весьма желательна.
Итак, в индукционной печи деталь нагревается до рабочей температуры 1000–1200 °C. После этого робот извлекает ее из печи и переносит в поковочную форму, где осуществляется первичное прессование. Затем робот вновь захватывает деталь и помещает ее в следующую поковочную форму. Процесс повторяется до тех пор, пока не закончится формование. После процесса ковки другой робот направляет деталь на закаливание. Полностью готовая деталь транспортируется роботом в контейнер.
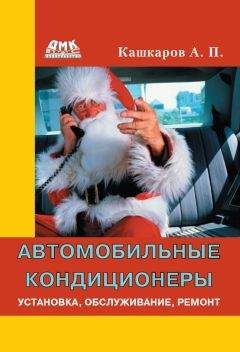
Система монтажных роботов, состоящая из основного робота (1) и вспомогательного робота (2), 3 — подача заготовки, X, Y — направления движений.
Удаление грата (излишков металла) с изделий из таких материалов, как чугун, алюминий, пластмасса и т. п., — трудоемкая, физически тяжелая и грязная операция. Для этих целей также применяются роботы, оснащенные вращающимися или скользящими напильниками и шлифовальными элементами. Они получают детали для обработки непосредственно после завершения процесса отливки.
Роботы можно использовать во всех отраслях промышленности, в том числе и в легкой, где отдельные предметы одежды часто изготовляются вручную. Наверное, доля ручного труда в изготовлении определенных индивидуальных модных предметов одежды даже спустя десятилетия будет оставаться еще относительно высокой, и по-прежнему ручная работа будет цениться гораздо дороже. Но подчас в таком труде нет никакой необходимости. Напротив, чем рациональнее организовано производство пошива, тем выгоднее оно для народного хозяйства и для покупателя. Поэтому очень важно внедрение швейных роботов в производство готового платья, где до сих пор около 75 % всего основного времени приходится на ручной труд, выполняемый преимущественно женщинами. Это значительно облегчит труд швей.
На отдельных промышленных предприятиях для экономии рабочего времени и для облегчения труда используются не только промышленные роботы, но и управляемые вручную манипуляторы. Это манипуляторы с дистанционным управлением для работы с ядовитыми и другими вредными для здоровья веществами или так называемые балансеры, подъемные механизмы, такие, как управляемые непосредственно человеком синхронные манипуляторы для перемещения тяжестей в пределах рабочего помещения при компенсации грузов. Они используются в кузнечных и литейных цехах для выполнения тяжелых погрузочно-разгрузочных работ, в медицине для поднятия и транспортировки носилок с пациентами.
Применяются роботы также и в научно-исследовательской работе. Если эффективность научных исследований в настоящее время в решающей степени определяется высокопроизводительным автоматизированным лабораторным оборудованием и приборами, то напрашивается ряд вопросов: не подкрепляется ли разработка и выпуск такого автоматизированного лабораторного оборудования как раз промышленной робототехникой? Нельзя ли с помощью роботов осуществлять время от времени эксплуатацию в три смены высокопроизводительных научно-исследовательских установок без обслуживающего персонала? Конечно же это возможно!
Другой пример: ученые занимаются всерьез так называемым роботом-поводырем. Это нечто вроде тележки с ходовым механизмом, имеющим привод и работающим от постоянного тока. На нем смонтированы сенсоры и микроЭВМ. С помощью этих технических устройств пространство около робота «ощупывается» ультразвуком и воздействием света. Робот может быть запрограммирован по методу запоминания пути, который предстоит пройти. Робот может затем по ряду характерных признаков вновь найти этот маршрут. Однако же для таких роботов название «промышленный робот» не совсем справедливо.
Роботы-сварщикиВо многих отраслях промышленности доля рабочего времени, требующегося для монтажа, сравнительно велика. Например, в машиностроении и автомобильной промышленности ГДР она составляет 33 %, а в электротехнике (электронике) — свыше 40 % общего рабочего времени. Из них опять же около 60 % приходится на операции, выполняемые вручную, около 30 % монтажных работ механизированы; около 10 % частично автоматизированы; 2–3 % полностью автоматизированы. По международным подсчетам, ручной труд приблизительно 70 % всех занятых на монтаже рабочих можно заменить или существенно сократить за счет использования промышленных роботов. Это увеличит производительность труда примерно на 30 %. Высвободится и рабочая сила.
Однако до сих пор в сфере монтажа промышленные роботы не нашли еще широкого применения, поскольку сборка является трудной для механизации и автоматизации областью. Здесь предъявляются очень высокие требования к умению обращаться с техникой. Зачастую применение роботов оканчивалось неудачей из-за отсутствия эффективных научно-исследовательских решений, ненадежности узлов монтажных роботов, а также неспособности «робота-монтажника» реагировать на неполадки. Таким образом, указанная выше в процентном отношении относительно невысокая доля механизированного монтажа не вызывает удивления.
Во всех развитых в промышленном отношении странах проводится интенсивная работа по решению этих задач. После того как в значительном объеме решены проблемы сенсорной техники, включая соединение различных видов сенсорной информации, распознавание деталей, а также уменьшено количество нарушений в технологическом процессе, на отдельных предприятиях были осуществлены эксперименты, в ходе которых оправдали себя различные образцы, началось последовательное внедрение промышленных роботов с сенсорным управлением для автоматизированного монтажа.
Грейферы монтажных роботов снабжены сенсорами, которые позволяют им распознавать, захватывать и монтировать соответствующие предметы. Например, монтажный робот, оснащенный адаптивной (способной приспосабливаться) грейферной головкой, вводит болт в отверстие. Различные образцы искомых предметов дают этому промышленному роботу возможность найти отверстия для данного болта. Вместо тактильных сенсоров для механической компенсации отклонений от положения применяются вспомогательные монтажные приспособления.
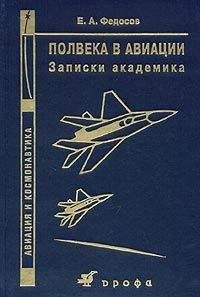
Принцип управляемой монтажной системы. 1 — акустический предохранительный сенсор, 2 — предохранительный сенсор (проводное включение), 3 — сенсор положения, скорости и ускорения, 4 — искатель в ультразвуковом диапазоне, 5 — участок тактильного сенсора, 6 — силовой сенсор, 7 — датчик контроля усилия зажима, 8 — оптический датчик (телекамера).
На Facebook
В Твиттере
В Instagram
В Одноклассниках
Мы Вконтакте
Подписывайтесь на наши страницы в социальных сетях.
Будьте в курсе последних книжных новинок, комментируйте, обсуждайте. Мы ждём Вас!
Подписывайтесь на наши страницы в социальных сетях.
Будьте в курсе последних книжных новинок, комментируйте, обсуждайте. Мы ждём Вас!
Похожие книги на "Роботы сегодня и завтра"
Книги похожие на "Роботы сегодня и завтра" читать онлайн или скачать бесплатно полные версии.
Понравилась книга? Оставьте Ваш комментарий, поделитесь впечатлениями или расскажите друзьям
Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь.
Мы рекомендуем Вам зарегистрироваться либо войти на сайт под своим именем.
Мы рекомендуем Вам зарегистрироваться либо войти на сайт под своим именем.
Отзывы о "Рейнгард Геттнер - Роботы сегодня и завтра"
Отзывы читателей о книге "Роботы сегодня и завтра", комментарии и мнения людей о произведении.